
未来终极方案,将纯视觉与激光雷达完美融合,为自动驾驶技术带来革命性突破。该方案通过高精度激光雷达获取环境信息,结合先进的视觉识别技术,实现精准导航与避障。方案还具备强大的数据处理能力,能够实时分析并处理海量数据,确保自动驾驶的安全与稳定。该方案还具备高度自主化、智能化特点,能够根据不同场景进行自主决策,实现更加人性化、个性化的驾驶体验。未来终极方案将引领自动驾驶技术的新潮流,为人们的生活带来更多便利与乐趣。
马斯克的纯视觉方案
马斯克的纯视觉方案是一种完全依赖于计算机视觉技术实现自动驾驶的方案,该方案的核心在于通过大量的图像数据训练神经网络,使其能够识别道路、车辆、行人等物体,并做出正确的驾驶决策,为了实现这一方案,需要大量的算力支持,对计算机硬件的要求非常高。
纯视觉方案也存在一定的门槛,由于完全依赖于计算机视觉技术,对于环境的感知和判断需要非常准确,否则可能会出现误判和误操作,纯视觉方案的实现需要耗费大量的时间和精力进行研究和优化。
激光雷达方案
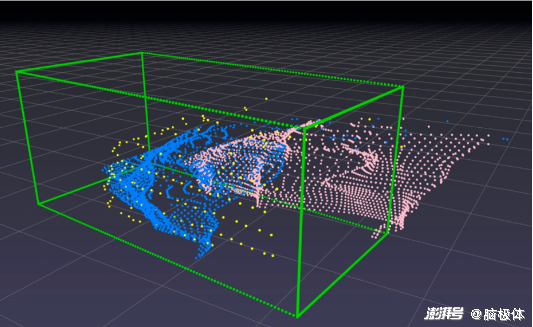
激光雷达方案是一种通过激光雷达设备获取车辆周围环境的三维数据,从而实现自动驾驶的方案,该方案的优点在于能够精确地获取车辆周围环境的信息,对于环境的感知和判断相对较为准确,激光雷达设备的成本也在逐渐降低,使得该方案在商业化方面具有一定的优势。
激光雷达方案也存在一定的门槛,由于激光雷达设备需要精确的安装和校准,对于车辆的结构和设计具有一定的要求,激光雷达数据的处理和分析也需要专业的技术和人才支持。
未来终极方案:纯视觉与激光雷达的完美结合
考虑到纯视觉方案和激光雷达方案的优势和劣势,未来终极方案可能会是一种将纯视觉与激光雷达技术相结合的方案,这种方案将充分利用两种技术的优点,同时弥补彼此的不足。
这种方案可能包括以下几个部分:
1、环境感知:通过激光雷达设备获取车辆周围环境的三维数据,确保对于环境的感知和判断相对较为准确。
2、物体识别:利用计算机视觉技术,对激光雷达获取的数据进行图像化处理,识别道路、车辆、行人等物体。
3、决策制定:结合环境感知和物体识别的结果,通过神经网络做出正确的驾驶决策。
这种方案的实现需要充分考虑各种因素,包括环境感知的准确性、物体识别的速度、决策制定的合理性等,也需要对计算机硬件和激光雷达设备进行不断的优化和改进,以提高方案的实用性和可靠性。
未来终极方案可能是纯视觉与激光雷达技术的完美结合,这种方案将充分发挥两种技术的优势,为自动驾驶技术的发展带来更多的可能性。
 鄂ICP备15020931号
鄂ICP备15020931号